

成果展示
创新产品
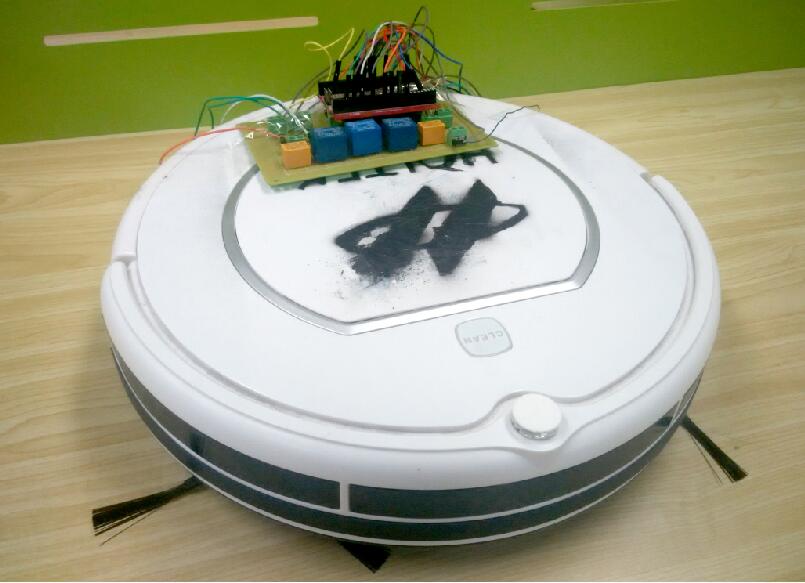
清洁机器人
来源: 时间:2018-06-25 点击: 次
智能化技术在其应用中主要体现在,精密传感技术,技术的综合应用。随着产品的日趋激烈,产品智能化优势在实际操作和应用中得到非常好的运用,其主要表现在:大大改善操作者作业环境,减轻了工作强度;提高了作业质量和工作效率;一些危险场合或重点施工应用得到解决;环保、节能;提高机器的程度及智能化水平,让智能化走进我们的生活,改变我们的生活。
于是,我们的设计应势而生, 具体做法是:设计一个具有自主清扫、避障、卡住报警、尘仓满仓检测等功能,能够在无人干预情况下自主完成室内清扫工作,也可以人为通过红外遥控器控制其状态的机器人系统。同时,为使机器人高效、可靠地完成作业,在其内部嵌入路径覆盖算法,使它脱离随机清扫的模式,能够记忆已走过的路径和遇到的障碍物位置,不遗漏地进行全区域清扫和不重复遇到同一个障碍物,实现高覆盖率、低重复率的清扫过程。
-
 电话:023-63430666(招生处)
电话:023-63430666(招生处)
-
 地址:重庆市江津区双福新区福星大道2号
地址:重庆市江津区双福新区福星大道2号
-
 邮编:402260
邮编:402260

版权所有:Copyright © 金沙城js9线路检测中心
渝ICP备12000576-1
公安备50011602500259